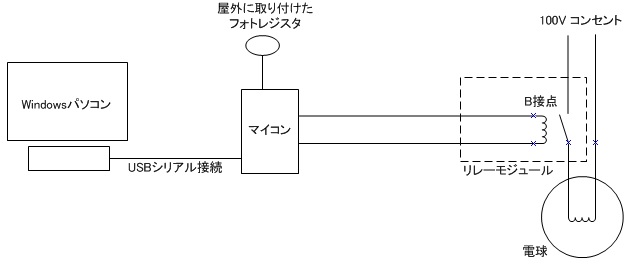
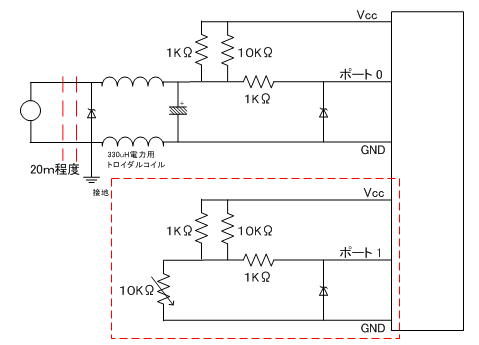
リレーモジュール にて調べました。Arduinoでシリアル通信 の "シリアル通信でリレーモジュールを操作するプログラム" をそのまま書き込んでいます。フォトレジスタで明るさを測定する での回路を使用しています。Arduinoでシリアル通信 のソフトを改造していきます。Option Explicit
Dim data(30) As Long
Dim ptr As Integer
Private Sub Class_Initialize()
Dim i As Integer
For i = 0 To 30
data(i) = -1
Next i
End Sub
'移動平均を計算する -1は無視される
Function average(str_val As String) As Long
Dim val As Long
On Error GoTo err
val = CLng(str_val)
On Error GoTo 0
If -1 <> val Then
data(ptr) = val
If 30 - 1 = ptr Then
ptr = 0
Else
ptr = ptr + 1
End If
Dim i As Integer
Dim pos As Long
pos = 0
For i = 0 To 30 - 1 Step 1
If -1 <> data(i) Then
pos = pos + data(i)
Else
Exit For
End If
Next i
average = Int(pos / i)
Exit Function
End If
err:
average = val
End Function
shoumei_20230617.zip Option Explicit
Dim timer As Long
Dim power_change As Integer
Dim power_real As Integer
Private Sub Class_Initialize()
power_change = 1
timer = 0
End Sub
'タイマーを減算する、現実の出力が変化したらリセットする
Public Sub clock(real As Integer)
If timer <> 0 Then
timer = timer - 1
Else
timer = 0
End If
If power_real <> real Then
power_real = real
timer = 0
End If
End Sub
'出力の変化を要請
Public Property Let Power(change As Integer)
If power_change = 1 And change = 0 Then
power_change = 0
'リレーがON状態からOFFの要請
timer = 60 / 2 '60秒のタイマーセット
ElseIf power_change = 0 And change = 1 Then
power_change = 1
'リレーがOFF状態からONの要請
timer = (10 * 60) / 2 '10分のタイマーセット
End If
End Property
'出力の状態を取得
Public Property Get Power() As Integer
If timer = 0 Then
Power = power_change
Else
Power = power_real
End If
End Property
'タイマーのリセット
Public Sub reset()
timer = 0
End Sub
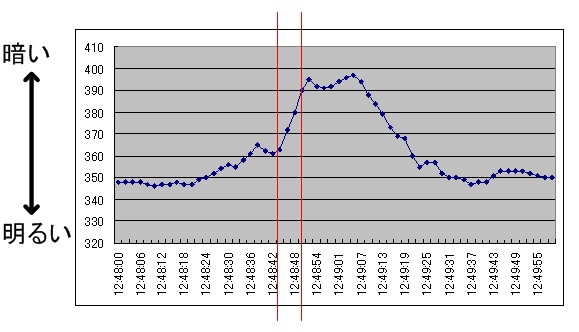
'センサーの値を判定する sensor センサーの値 real_output 現在の出力 enable 有効/無効
Public Function calc(sensor As Long, real_output As Integer, enable As Integer) As Integer
If 1 = enable Then
If sensor > 400 Then
calc = 0
ElseIf sensor < 350 Then
calc = 1
Else
calc = real_output
End If
Else
calc = 0
End If
End Function
shoumei_20230620.zip auto_control_digital_pin(0) = 0 '自動制御にて関数開始状態を設定する変数 初期値:0
Public auto_control_func_next_state_setting As Integer
Public Const NONE_SETTING = 0 '何もしない
Public Const ENABLE_SETTING_1 = 1 '有効
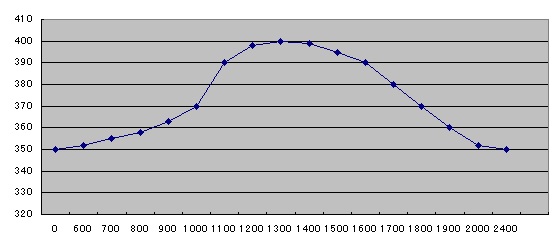
Public Const DISABLE_SETTING_0 = -1 '無効 threshold.setThreshold(650, 0) shoumei_20230624.zip 線形補間 にて事前にVB6用のコードを作成しました。Option Explicit
Dim threshold_ As New threshold
Dim map1() As Variant
Dim map1_w As Long
Private Sub Class_Initialize()
'数列の作成
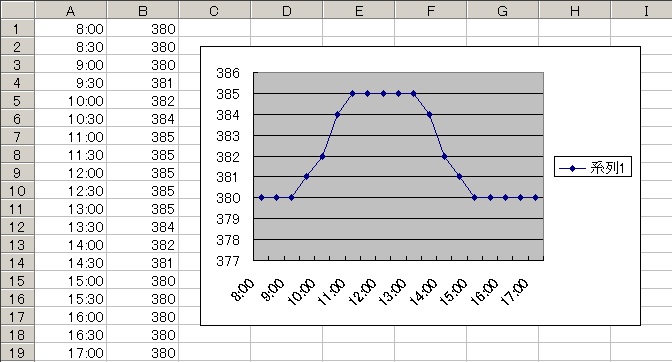
map1 = Array( _
0, 900, 1100, 1300, 1500, 2400, _
380, 380, 385, 385, 380, 380 _
)
'数列の幅を計算
map1_w = (UBound(map1) + 1) / 2
End Sub
'線形補間のマクロ
Private Function INTERP(xi As Long, xi1 As Long, yi As Long, yi1 As Long, x As Long) As Long
INTERP = (yi + (((yi1 - yi) * (x - xi)) / (xi1 - xi)))
End Function
'線形補間 x:補間する値 ar:数列 w:数列の横の長さ
Private Function interp1dim(x As Long, ByRef ar_() As Variant, w As Long) As Long
Dim i As Long
'xの値が範囲外の場合はxが最大最小値の値を返す
If x <= ar_(0) Then
interp1dim = ar_(w)
Exit Function
ElseIf x >= ar_(w - 1) Then
interp1dim = ar_(w * 2 - 1)
Exit Function
End If
For i = 0 To (w - 1) Step 1
If ar_(i) >= x Then Exit For
Next i
' y=yi + (yi+1-yi)(x-xi)/(xi+1-xi) を行い値を返す
interp1dim = INTERP(CLng(ar_(i - 1)), CLng(ar_(i)), CLng(ar_(i + w - 1)), CLng(ar_(i + w)), x)
End Function
'センサーの値を判定する sensor センサーの値 real_output 現在の出力 enable 有効/無効
Public Function calc(sensor As Long, real_output As Integer, enable As Integer) As Integer
Dim str As String
str = Format(Now, "HH:MM:ss")
Dim m, h, v, pos As Long
m = CLng((CLng(Mid(str, 4, 2)) / 60) * 100)
h = CLng(Mid(str, 1, 2) & "00")
v = h + m
pos = interp1dim(CLng(v), map1, map1_w)
'Form1.Caption = CStr(pos) + " " + CStr(350) 'デバッグのため
Call threshold_.setThreshold(pos, 350)
calc = threshold_.calc(sensor, real_output, enable)
End Function
shoumei_20230713.zip Private Sub share_data_file(str As String, filename As String) version 0_14_4_1 ■ 人間の明るさの感じ方の解釈の修正 トップページ の「ご意見ご感想」からメールを送って教えていただけるとうれしいです。色々考察した結果、[2匹目の悪魔] の復帰(消灯)には作業者に気が付かれないように(ゆっくりと)消灯する必要があり、調光機能付き照明設備でないと実現できない為、あきらめました。 オッカムの剃刀 」的な物だと思っています。 '季節の変化によるオフセット値
map1_Season = Array( _
'1月 2月 3月 4月 5月 6月 7月 8月 9月 10月 11月 12月 全部21日基準
0, 20, 51, 79, 110, 140, 171, 201, 232, 263, 293, 324, 354, 366, _
-30,-30, -20, -15, -7, 0, 0, 0, -7, -15, -20, -30, -30, -30 _
)
線形補間 を行い、年初からの日数により値を求めて日々の制御の閾値を動的に変更していきます。フォトレジスタで明るさを測定する の回路を使っていますが、アナログ回路ですので同じものを複製できません。GY-30 照度センサー を取り付けてアナログ値と明るさを表す単位のルクスの相関がわかるグラフを作成します。GY-30 照度センサー の回路と同様に接続しました。
#include <avr/wdt.h>
#include <Wire.h>
//GY-30 接続先のアドレス
#define ADDRESS 0b00100011
unsigned char buff_gy30[10];
#define SYSTEM_TIMEOUT 60 //通信途絶後60秒で初期化
#define BUF_SIZE 255
void setup() {
wdt_enable(WDTO_4S); //WDTを4秒で設定し有効化
//デジタルピン2番から11番まで出力に設定
for (int i = 2; i < 12; i++) {
pinMode(i, OUTPUT);
}
Serial.begin(9600, SERIAL_8E1); //偶数パリティ
Wire.begin();
Wire.beginTransmission(ADDRESS);
Wire.write(0b00010000);
Wire.endTransmission();
serial_wdt_reset();
}
char buff[BUF_SIZE];
char buff_old[BUF_SIZE];
char pin_status[11] = { '0', '0', '0', '0', '0', '0', '0', '0', '0', '0', '\0' }; //デジタルピン2番から11番の状態を保持し一度に転送
unsigned int str_pt;
unsigned long int timeout_timer;
//ピンの状態をまとめて転送
void trans_pin_status() {
int j = 0;
for (int i = 2; i < 12; i++) {
if (pin_status[j] == '1') {
digitalWrite(i, LOW); //出力先がアクティブローのため反転
} else {
digitalWrite(i, HIGH);
}
j++;
}
}
//ピンに転送前の元データを初期化する
void reset_pin_status() {
for (int i = 0; i < 10; i++) {
pin_status[i] = '0';
}
pin_status[10] = '\0';
}
unsigned long serial_wdt_counter;
//シリアル通信がSYSTEM_TIMEOUT秒停止した場合に出力をリセットする
void serial_wdt() {
unsigned long pos = ((unsigned long)millis()) - serial_wdt_counter;
if (pos > ((unsigned long)((unsigned long)SYSTEM_TIMEOUT * 1000))) {
reset_pin_status(); //タイムアウトしているため初期化
}
}
//リセットタイマーをリセットする
void serial_wdt_reset() {
serial_wdt_counter = millis();
}
void loop() {
wdt_reset(); //WDTのリセット
serial_wdt();
if (Serial.available()) {
char c = char(Serial.read());
timeout_timer = millis(); //msを取得
buff[str_pt] = c;
str_pt++;
if (c == '\n') { //LFを終端文字とする
buff[str_pt] = '\0';
if (strcmp(buff_old, buff)) {
//比較文字列と違うため保存
strcpy(buff_old, buff);
Serial.println("NG");
} else {
//比較文字列と同じため命令を実行
if (buff[0] == 'w') {
int j = 0;
for (int i = 1; i <= 10; i++) {
if (buff[i] == '1') {
pin_status[j] = '1';
} else {
pin_status[j] = '0';
}
j++;
}
Serial.println("OK");
serial_wdt_reset();
} else if (buff[0] == 'r') {
//2回出力
Serial.print("r,");
Serial.println(pin_status);
Serial.print("r,");
Serial.println(pin_status);
serial_wdt_reset();
} else if (buff[0] == 'a') {
static unsigned long c;
int _ar[6];
_ar[0] = analogRead(A0);
_ar[1] = analogRead(A1);
_ar[2] = analogRead(A2);
_ar[3] = analogRead(A3);
_ar[4] = analogRead(A4);
_ar[5] = analogRead(A5);
Serial.print("a,");
for (int i = 0; i < 6; i++) {
Serial.print(_ar[i]);
Serial.print(',');
}
Serial.println(c);
Serial.print("a,");
for (int i = 0; i < 6; i++) {
Serial.print(_ar[i]);
Serial.print(',');
}
Serial.println(c++);
serial_wdt_reset();
} else if (buff[0] == 'x') {
unsigned char*buf_pt;
buf_pt = buff_gy30;
Wire.requestFrom(ADDRESS, 2); //接続し2byte取得する
while (Wire.available()) {
*buf_pt++ = (unsigned char)Wire.read();
}
if ((buf_pt - buff_gy30) >= 2) {
unsigned short pos;
pos = buff_gy30[0] << 8;
pos = pos + buff_gy30[1];
pos = pos / 1.2;
Serial.print("x,");
Serial.println(pos);
Serial.print("x,");
Serial.println(pos);
} else {
Serial.println("NG");
}
serial_wdt_reset();
} else if (buff[0] == 't') {
Serial.println("NG");
}
buff_old[0] = '\0'; //命令が終了したため旧命令は破棄
}
str_pt = 0;
}
//バッファサイズを超えないようにする
if (str_pt >= BUF_SIZE) {
str_pt = 0;
}
} else {
//データを受信せずに500ms経過した場合にはタイムアウトで初期化
if (str_pt) {
if ((millis() - timeout_timer) > 500) {
str_pt = 0;
}
}
}
trans_pin_status();
}
Private Sub Timer1_Timer()
If sleep_timer1 > 0 Then 'timer1を一時的に停止する
sleep_timer1 = sleep_timer1 - 1
Exit Sub
End If
On Error GoTo Err1
Do
MSComm1.Output = "r" & vbCr & vbLf
Loop While MSComm1.OutBufferCount >= 1
Do
MSComm1.Output = "r" & vbCr & vbLf
Loop While MSComm1.OutBufferCount >= 1
Do
MSComm1.Output = "a" & vbCr & vbLf
Loop While MSComm1.OutBufferCount >= 1
Do
MSComm1.Output = "a" & vbCr & vbLf
Loop While MSComm1.OutBufferCount >= 1
Do
MSComm1.Output = "x" & vbCr & vbLf
Loop While MSComm1.OutBufferCount >= 1
Do
MSComm1.Output = "x" & vbCr & vbLf
Loop While MSComm1.OutBufferCount >= 1
On Error GoTo 0
Dim str As String
Dim st_arry() As String
Do While data_ptr <> 0
str = pop()
If Mid(str, 1, 1) = "x" Then
com_x_data_old = com_x_data
com_x_data = str
If com_x_data = com_x_data_old Then
st_arry = Split(com_x_data, ",")
Text5.Text = Replace(st_arry(1), vbCrLf, "") '最後のCRLFを取り除く
End If
End If
If Mid(str, 1, 1) = "r" Then
com_r_data_old = com_r_data
com_r_data = str
If com_r_data = com_r_data_old Then
digital_pin(0) = CInt(Mid(str, 3, 1))
digital_pin(1) = CInt(Mid(str, 4, 1))
digital_pin(2) = CInt(Mid(str, 5, 1))
digital_pin(3) = CInt(Mid(str, 6, 1))
digital_pin(4) = CInt(Mid(str, 7, 1))
digital_pin(5) = CInt(Mid(str, 8, 1))
digital_pin(6) = CInt(Mid(str, 9, 1))
digital_pin(7) = CInt(Mid(str, 10, 1))
digital_pin(8) = CInt(Mid(str, 11, 1))
digital_pin(9) = CInt(Mid(str, 12, 1))
End If
End If
If Mid(str, 1, 1) = "a" Then
com_a_data_old = com_a_data
com_a_data = str
If com_a_data = com_a_data_old Then
'Dim st_arry() As String 変数宣言を削除
st_arry = Split(com_a_data, ",")
Text1(0).Text = st_arry(1)
Text1(1).Text = st_arry(2)
Text1(2).Text = st_arry(3)
以下続くため省略
'現在の状態をログに書き出す
Private Sub condition_log_write()
str = ""
str = "," + Text1(0).Text + "," + Text5.Text
Call logWrite(str, Format(Now, "yyyymmdd") + ".csv")
End Sub
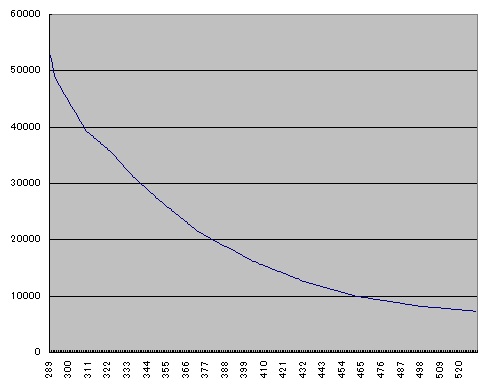
フォトレジスタの値
ルクス値
530
7259
324
35386
292
48560
これらの数値を使ってマップを作成しグラフを描画しました。const int ar[]={
/* x */ 288, 292, 309, 324, 335, 351, 372, 402, 431, 460, 496, 530,
/* y */ 54106, 48560, 39350, 35386, 31376, 26847, 21485, 16316, 12685, 10038, 8250, 7259
};
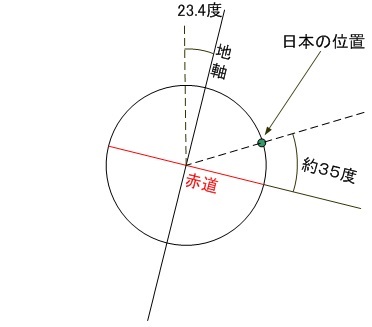
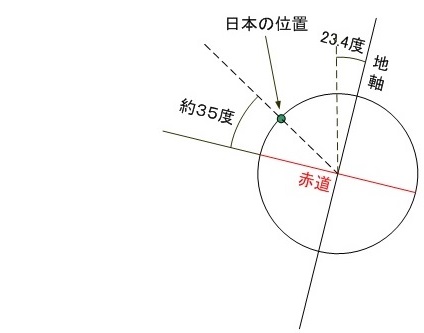
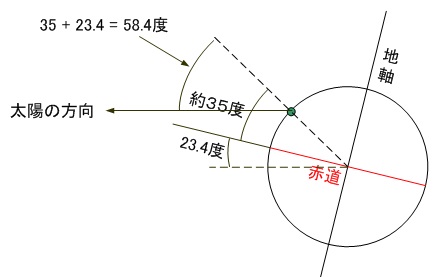
GL5528 を使用しています。シリアル通信を光ファイバー経由する 北側45°の角度でセットされたCDSセル、このセンサーが制御の生命線です。 map_ver = "2025/07/11"
'数列の作成 ONになる側の閾値
map1_H = Array( _
0, 600, 700, 800, 900, 1000, 1100, 1200, 1300, 1400, 1500, 1600, 1700, 1800, 1900, 2000, 2400, _
320, 330, 340, 340, 341, 343, 345, 360, 360, 360, 350, 345, 340, 330, 320, 320, 320 _
)
'ONからOFFにする閾値を引く数(マップを設定するのが面倒で簡略化のため)
map1_OFF = Array( _
300, 365, 370, 375, 400, 450, _
10, 10, 20, 30, 40, 80 _
)
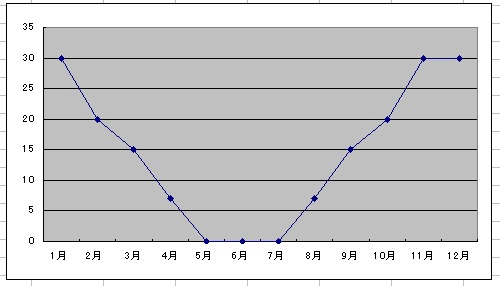
'季節の変化によるオフセット値
map1_Season = Array( _
0, 20, 51, 65, 79, 94, 110,125, 140,155, 171,186, 201,216, 232,247, 263, 278, 293, 308, 324, 354, 366, _
0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 5, 10, 20, 20, 10, 5 , 0, 0, 0, 0, 0, 0, 0 )
' ,1/21,2/21,3/7,3/21, 4/5,4/21,5/6,5/21,6/5,6/21,7/6,7/21,8/5,8/21,9/5 ,9/21,10/6,10/21,11/5,11/21,12/21,
version 1_5_6 Arduinoでシリアル通信 ▲トップページ