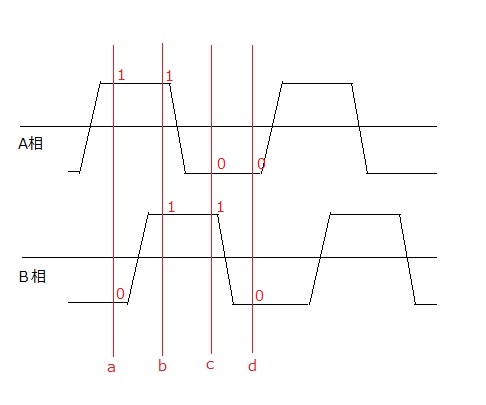
10 → 11 → 01 → 00 00 → 01 → 11 → 10
00 10 : 0x02 : 0x0b : 0x0d : 0x04
の値を取り、逆転の場合には
10 00 : 0x08 : 0x01 : 0x07 : 0x0e
の値を取ります。(赤色の文字は値を16進数に変換した値です)
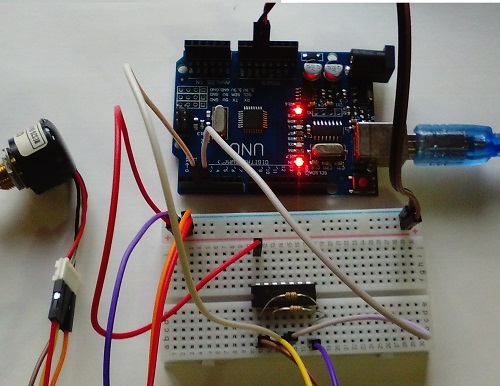
void setup() {
Serial.begin( 9600 );
pinMode( 2, INPUT );
pinMode( 3, INPUT );
}
int old;
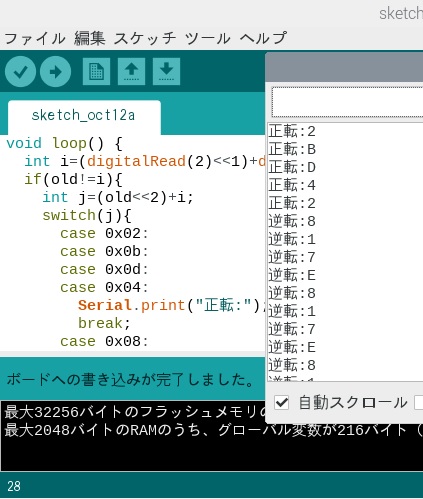
void loop() {
int i=(digitalRead(2)<<1)+digitalRead(3);
if(old!=i){
int j=(old<<2)+i;
switch(j){
case 0x02:
case 0x0b:
case 0x0d:
case 0x04:
Serial.print("正転:");
break;
case 0x08:
case 0x01:
case 0x07:
case 0x0e:
Serial.print("逆転:");
break;
default:
Serial.print("エラー:");
}
Serial.println(j,HEX);
old=i;
}
}
▲トップページ
>
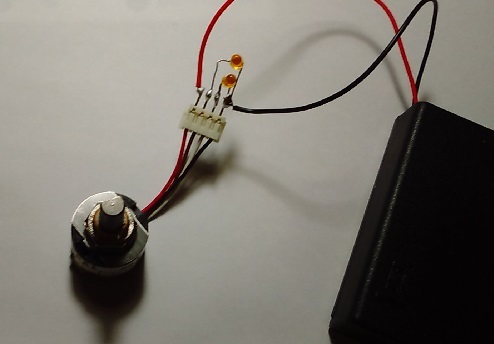
マイコンなど